|
The objective of this exercise was to identify and analyze the home ranges of seven coyotes based on point data collected by tracking. In addition to identifying their core and general ranges, their actual use of different land cover types was analyzed and reported. 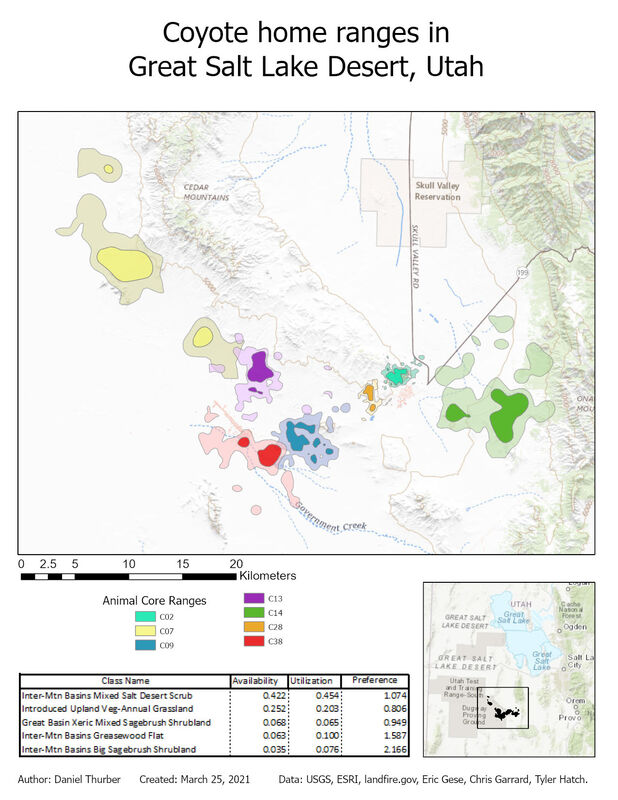 The workflow for this analysis drew upon previously-used tools such as point-polygon-raster conversions and interactions and raster reclassification. We also generated a point shapefile from a .csv file and used the kernel density geoprocessing tool to extend a probability surface to represent coyote ranges. The nature of this process explains why all of the ranges include multiple disconnected areas. The ranges shown represent areas where each animal is 50% (core range) and 95% (general range) likely be detected based on experimental data. Most significantly, this lab introduced us to automation of repetitive geoprocessing tasks using the ArcPy library in Python 3. We used a script previously developed by Chris Garrard and Tyler Hatch and applied it to our data directly through the geoprocessing toolbox. These scripts can also be executed independently in a Python console. Upon generating individual polygon files for each animal, the ranges and detection data were superimposed on land cover data to analyze what habitat was most available to the animals as a collective unit and where they were observed. The preference ratio refers to how frequently animals were observed in the given land cover compared to how much of that land cover was available. The 15 most available land cover types are reported below. 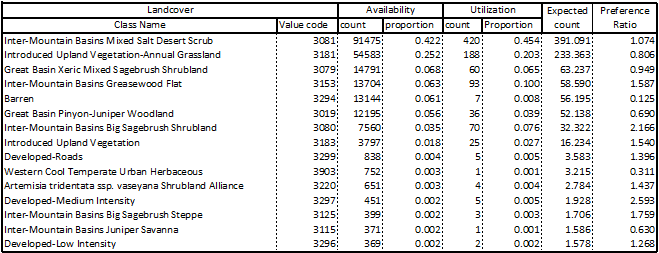 View a high-resolution PDF here.
0 Comments
Leave a Reply. |
Advanced GISThis page is a repository of lab exercises produced for WATS 6920 - Advanced GIS Archives
April 2021
Categories |
 RSS Feed
RSS Feed
